Symbitron Modular Exoskeleton
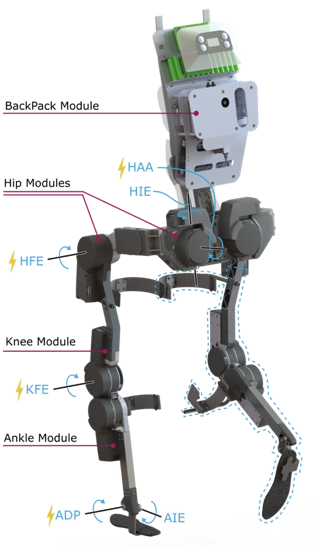
We use the exoskeleton developed in the EU project Symbitron and will further improve and extent the functionalities of this exoskeleton. The figure below shows the Symbitron wearable exoskeleton including the different modules and joints. The axis denoted by an abbreviation (HAA, HIE, HFE etc.) are the exoskeleton joints. The joints with an electricity icon are powered by an electric motor. This picture shows the hip-ankle-knee (HKA) configuration. The blue dashed region indicates the right leg ankle-knee (AK) configuration. Because of the modular structure, changing between the aforementioned configurations is relatively simple.
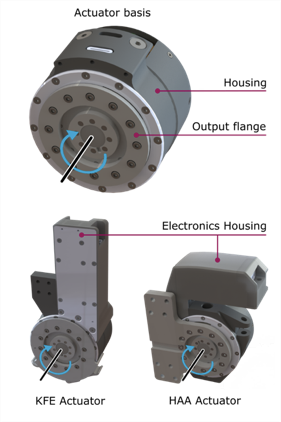
All powered joints of the exoskeleton are driven by the same rotary actuator. The next figure shows the exoskeleton actuator with the actuator basis (equal for all joints) and two implementations in the exoskeleton. The basis consists of a cylindrical housing with mass of 1.25 kg and envelope of 100 mm in diameter and 70 mm thickness.